Automated Blinds Part 2: Mechanical Integration Work
I went through a couple more iterations on the mechanical design over the last week, just nailing down the drivetrain to where I’m happy with it. The one thing I’m still not psyched about it the torque transfer between the pinion gear and the insert that attaches to the blinds. I’m having trouble finding a D profile shaft that would fit what I need that’s inexpensive / readily available. I settled on clamping the bearing stack with a shoulder screw and using some set screws (in drilled detents) to transfer torque from the pinion to the tube insert (I know, cardinal sin) but it works fine since it’s fairly low torque.
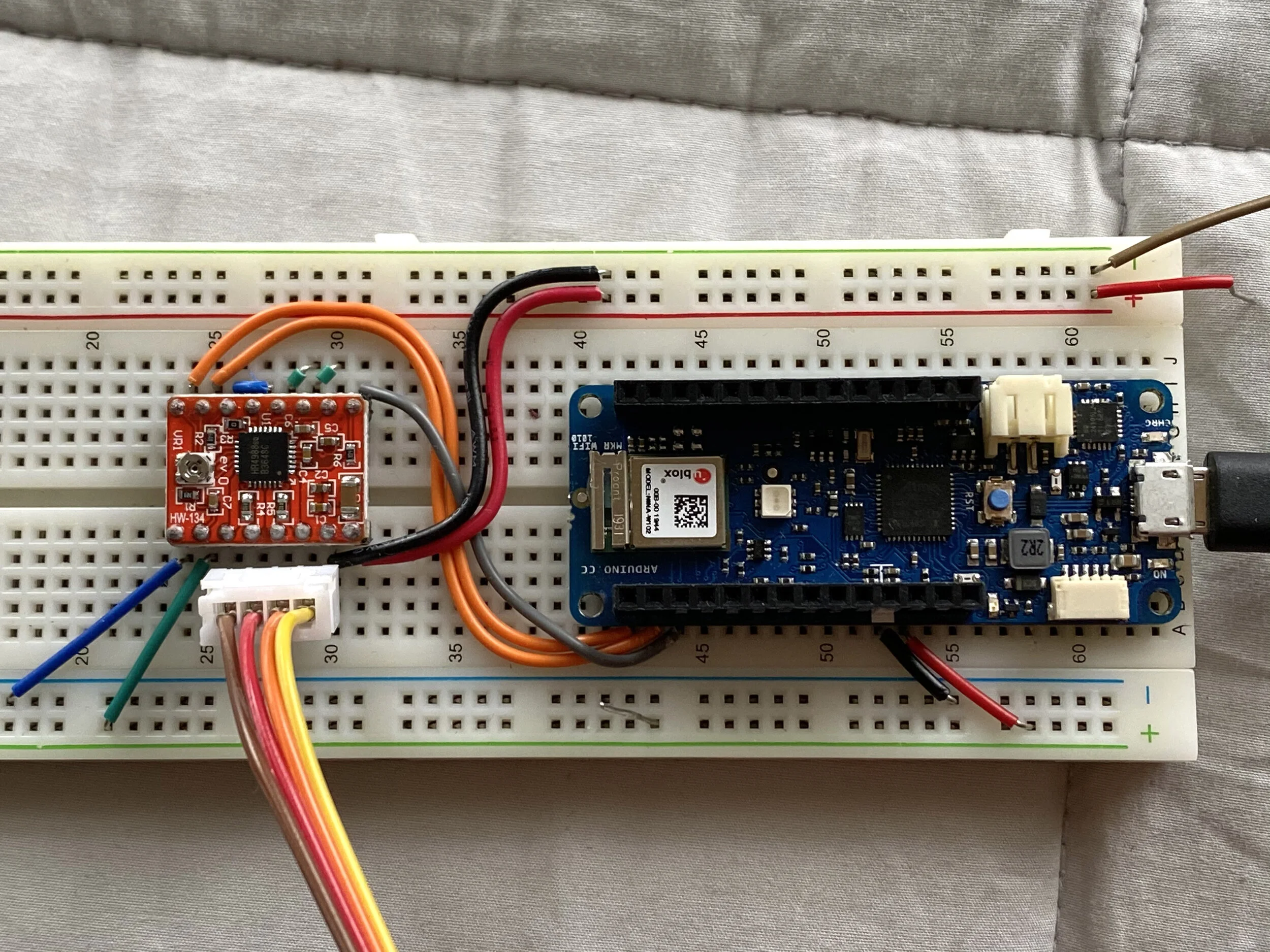
I started the more in depth firmware but am definitely running into some issues with the homing sequence. It’s my first time using AccelStepper which is causing the most pain, but I just need to get more familiar with the library. Here’s a video of the motor running some basic up down code with acceleration ramps.
The motor is also a little louder than I’d like so I’m fairly certain I’m going to have to get the TMC2208 drivers working (currently using the a4988). There’s a ton of really great tutorials on how to use the a4988 driver and I’ve learned a lot about how to use stepper drivers in general so I’m hoping going back to the TMC2208 will be easier. The only thing I’m worried about is there need for active cooling. I’m banking on me running the motors for a short enough time that thermals won’t come into play. Adding a fan wouldn’t be super hard but it would be extra noise, wiring, and complexity.
I’m going to keep developing the firmware on this breadboard setup and likely post some more homing code tonight.